Descripción:
El kit para amar brazo robot de 6 grados de libertad con Arduino, fue diseñado para que en pocos minutos puedas controlarlo desde tu teléfono Andriod. Puedes utilizarse con fines educativos o aplicaciones especificas, utiliza la plataforma Arduino por lo que el código esta abierto para que lo modifiques si es necesario.
Requisitos:
Tener instalado el IDE de Arduino
Saber como descargar un repositorio de GitHub
Lista de materiales:
-
- 1 Fuente de alimentación de 5V a 2 A
- 1 Computadora
Desarrollo
- En primera instancia revisar que todos los componentes estén completos, tomar un tornillo de metal M3x6mm y pasarlo por todos los separadores para comprobar que la rosca esta bien y no tenga alguna rebaba ya que si usamos directamente el tornillo de nylon podemos barrer (trasroscar) o sea difícil su acceso, ejemplo:



- Retira la protección de las piezas de acrílico.

- Tomamos un micro Servo SG90 este lo alineamos a 90° con el siguiente código utilizando solo 3 Cables Dupont Macho a Macho.
#include <Servo.h>
Servo myservo;
Servo myservo1;
int pos = 0;
void setup()
{
myservo.attach(9);
myservo1.attach(8);
}
void loop()
{
for (pos = 0; pos <= 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
for (pos = 180; pos >= 0; pos -= 1)
{
myservo.write(pos);
delay(15);
}
myservo1.write(90);
}
- La conexión sera de la siguiente manera.


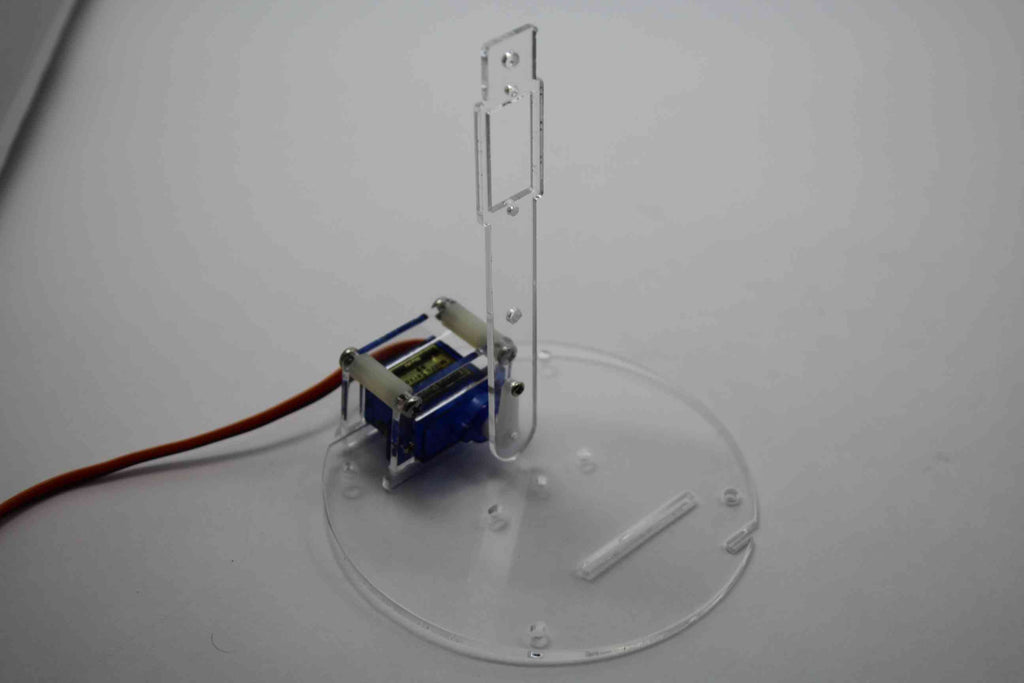
- Ya alineado el Servo a 90° procederemos a colocarlo en la siguiente pieza y de esta manera utilizando 2 tornillos M2x10mm y 2 Tuercas M2

- Se colocaran 4 separadores de Latón M3x20mm con 4 tornillos M3x6mm que serán atornillados en la parte superior, uniendo la pieza de acrílico y los separadores como se muestra en la imagen.

- Retiramos la pieza que acabamos de ensamblar para proceder con el siguiente ensamble.
- Tomaremos las siguientes piezas.


- Estas piezas se ensamblaran de la siguiente manera.

- A esta pieza se le colocara un Servo el cual sera orientado en 90° como lo hicimos con el primer servo, de igual manera sera atornillado con 2 tornillos M2x10mm y 2 Tuercas M2, a este mismo se le colocaran 2 separadores de Nylon M3x15mm que serán fijados con 4 tornillos M3x6mm como lo muestra la siguiente imagen.

- Procederemos a colocar el accesorio de servo a la siguiente pieza, este sera fijado con los tornillos que vienen junto con el servo.

- El cual quedara de esta manera. NOTA siempre poner el servo a 90°.
- El la imagen anterior podemos observar que el accesorio fue atornillado al servo, tomar en cuenta que existen 2 tipos de tornillos uno es mas pequeño que el otro, el mas grande siempre ira directo al eje del servo y el mas pequeño sera de apoyo.
- La siguiente pieza es paralela a la pieza que se encuentra ensamblada y sera colocada en un servo. NOTA existen 2 piezas parecidas como la siguiente, la que estamos utilizando es mas delgada y tiene mas orificios.

- Seguiremos con la instalación del accesorio y la fijación al servo. NOTA no olvide el orden de los tornillos el tornillo grande en el eje y el pequeño de apoyo.

- Para el siguiente ensamble tomar en cuenta la secuencia de las siguientes fotos ya que los 2 ejes deben quedar encontrados, prestar atención siempre coloquemos el servo a 90° , si esto no se hace tal cual se muestra podremos dañar los servos o simplemente no podrá proseguir con el ensamble. Ambos servos fueron fijados con tornillos M2x10mm y tuercas M2, los separadores son de Nylon M3x15mm y los tornillos de acero M3x6mm, es importante fijar muy bien los servos y los separadores a las piezas de acrílico.


- El siguiente servo sera instalado como lo muestra la siguiente imagen, se usaran 2 tonillos M2x10mm y 2 tuercas M2.

- Continuaremos fijando 2 separadores de Nylon M3x20mm con 4 tornillos de Nylon M3x6mm como se muestra. Antes de fijar el separador de la parte superior colocaremos un tornillo M2 por dentro este nos servirá de eje.

- Al servo que acabamos de instalar continuaremos agregándole su accesorio, este accesorio se ensambla de manera distinta a los 2 anteriores.

- Primero tendremos que situar el accesorio a la pieza de acrílico, continuando la fijaremos con un tornillo en el hueco que tiene, después lo pondremos en el servo y la fijaremos con su tornillo como se muestra continuación:

- Proseguimos con la paralela de esta pieza que sera situada en la parte trasera donde colocamos el tornillo M2x10, junto con un separador de acrílico.
-


- Después de fijarlo con una tuerca M2 quedara de esta manera:

- El siguiente paso es poner un servo en el espacio de la pieza de nuestra izquierda, el servo quedara fijado de manera que el eje quede por dentro, de forma contraria al servo pasado como lo muestra la imagen, utilizando 2 tornillos M2x10mm y 2 tuercas M2:

- Ya fijado continuaremos colocando el accesorio de servo a la siguiente pieza:


- La siguiente es fijar la pieza al servo, recordando situar los 90°, después de fijarlo colocaremos 2 separadores de Nylon M3x20 con sus 4 tornillos de Nylon M3x6mm.

- El siguiente ensamble es con esta pieza y un servo.

- El cual quedara de esta manera, utilizando 2 tornillos M2x10mm y 2 tuercas M2:

- Ahora uniremos el servo con el brazo, las piezas tiene un hueco es donde esta va, no olvidemos poner el eje de manera lineal con el eje del servo anterior:

- La pieza que sigue antes de fijarla es necesario colocar un tornillo M2x10 de esta manera y un separador de acrílico como se muestra en la foto:

- La fijamos, en este ensamble nos podemos apoyar con un papel doblado u un cartón delgado ejemplo:

- Después pondremos los separadores de Nylon, para esto tendremos que unir 2 separadores uno macho hembra M3x20mm y otro hembra hembra M3x15mm, con 2 tornillos de Nylon M3x6mm.

- Este ensamble quedara de esta manera:

- Para armar el Gripper de clic Aqui, siga los pasos.
- Ahora seguiremos colocando la siguiente pieza con su accesorio de servo, dependiendo de como acomoden esta pieza es de la forma que ira su gripper, si gusta puede colocarlo de la manera que lo hicimos nosotros tome en cuenta las siguientes fotos:


- Para colocar esta pieza es necesario desatornillar un poco los tornillos para que entre y evitar que se rompa, ya hecho esto la pieza quedara de esta manera:

- Ahora fijaremos el penúltimo servo de esta manera, esto lo hicimos hasta ahora para que usted pueda escoger en que posición poner el gripper:


- Uniremos el primer eje con el resto del brazo para eso sera necesario fijar el accesorio de servo a la base este se colocara tomando en cuante hacia que sentido prefiere que gire no olvide siempre poner los servos a 90°, también pondremos 4 separadores de Nylon M3x12mm con 4 tornillos M3x6mm como se muestra a continuación:



- Por ultimo fijaremos la base con el brazo utilizando 4 tornillos M3x6mm

- Como resultado tendremos el brazo de esta manera:


Descargas
Programa
- En la siguiente imagen encontraras la conexión que se realizara en el Sensor Shield de Arduino UNO junto con el servo.

- Pin 10 muñeca YAW eje 6
- Pin 9 muñeca PITCH eje 5
- Pin 8 muñeca ROLL eje 4
- Pin 7 codo eje 3
- Pin 6 hombro eje 2
- Pin 5 hombro eje 2.1
- Pin 4 Base eje 1

- Para la alimentación sera con una fuente de 5V a 2 o mas ampere y la conexión es en el Sensor Shield como lo muestra la siguiente imagen:

NOTA: SOLO ALIMENTAR EL SHIELD, SI USTEN ALIMENTA EL ARDUINO LO QUEMARA YA QUE EL ARDUINO SOLO PUEDE DAR A LA SALIDA 500MILIAMPERES Y LOS SERVOS NECESITAN 300MILIAMPERE POR CADA UNO(SON 7 SERVOS LO QUE ES 2100MILIAMPERE POR LO QUE SE RECOMIENDA UNA FUENTE MAYOR A 2 AMPERE).
Aplicación
- Para la conexión del Modulo bluetooth HC-05 lo pondremos en el proto de 400 puntos, del pin RX del modulo al pin 2 del Arduino, del pin TX del modulo al pin 3 del Arduino, del pin GND del modulo al pin GND del Arduino, del pin VCC del modulo al pin 5v del Arduino.

- Descargue la app, usted tendrá que dar click en Seleccionar tu dispositivo, seleccione el bluetooth espere a que haga la conexión y ahora podrá mover el brazo servo a servo observe las siguientes imágenes:



App
Código























































Comentarios
Dejar un comentario